


ABB机器人通过不同坐标系可指定工具(工具中心接触点)的位置,以便编程和调整程序。 确定的坐标系基于机械臂必须要做的事项。若未确定坐标系,则可通过基座坐标系确 定机械臂的位置。
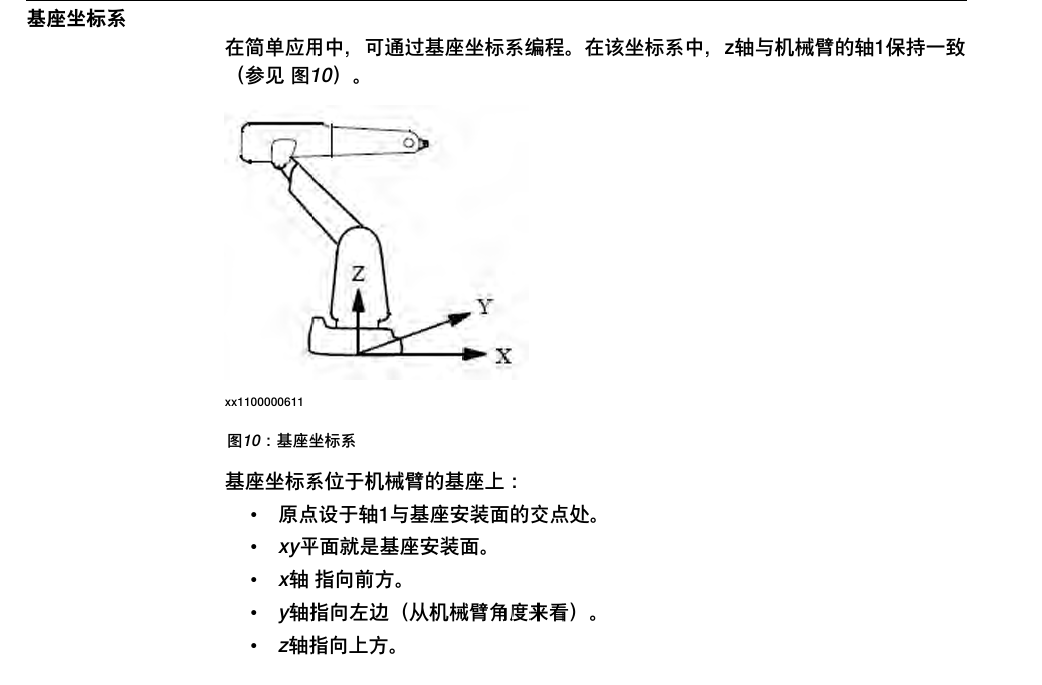
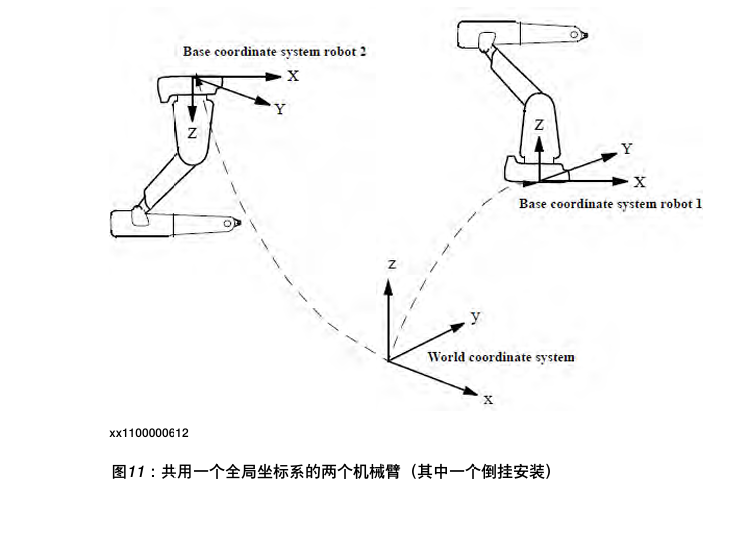
若机械臂是安装在地面上,则通过基座坐标系编程较容易。但,如果机械臂是倒置安 装(倒挂安装),那么因各轴的方向与工作空间内的主要方向不同,导致通过基座坐 标系编程变难。此时,定义一个全局坐标系很有用。全局坐标系将与基座坐标系保持 一致,除非另有规定。 有时,在某一装置的同一工作空间内,会有多个机械臂同时运作。此时,要用公用全 局坐标系启用机械臂程序,以便与其他机械臂保持联系。另外,当多个位置与某一车 间内的一个固定点相连时,也适合用此类系统。
一个机械臂可与不同位置、不同方位的各种固定设备或工作面工作。可为各固定设备
定义一个用户坐标系。若将所有位置都通过对象坐标保存下来,则在必须移动或转动
该固定设备时,不需要再次编程。按移动或转动固定设备的情况移动或转动用户坐标
系,此时所有的已编程位置都将随固定设备变动,因而不需要再次编程。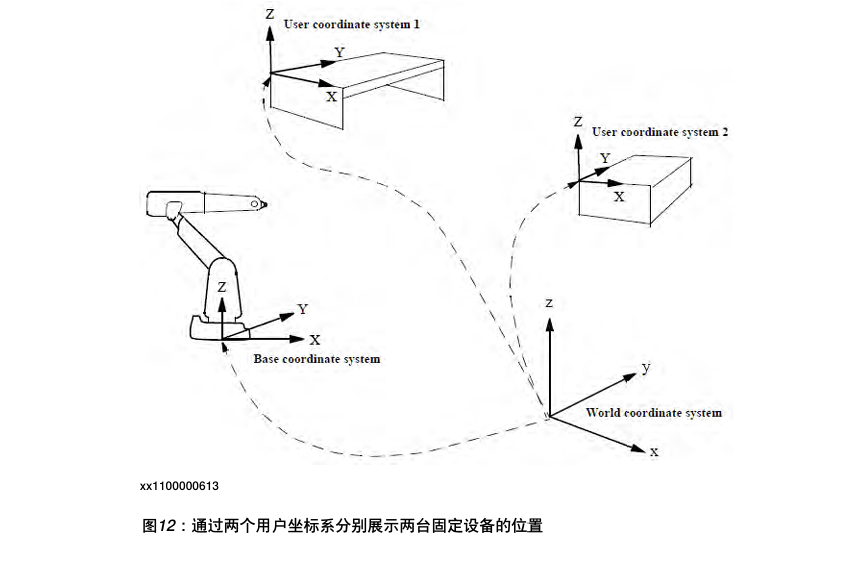
更多资讯:ABB机器人
