


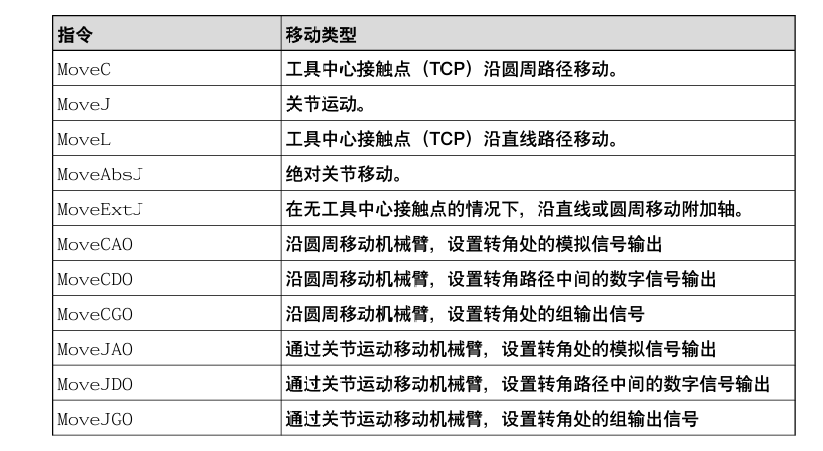
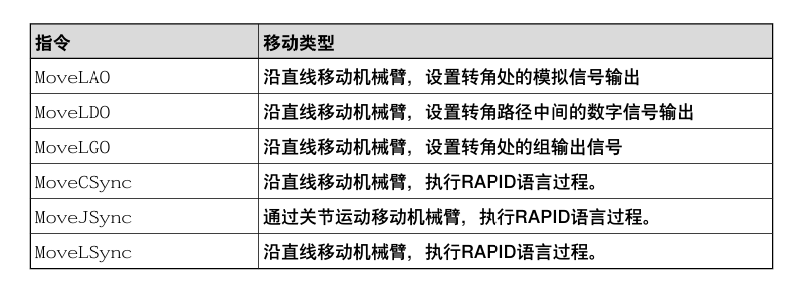
运动指令:
机械臂运动原理 将机械臂移动设为姿态到姿态移动,即从当前位置移到下一位置。随后机械臂可自动 计算出两个位置之间的路径。
编程原理 通过选择合适的定位指令,可确定基本运动特征,如路径类型等。 而其他运动特征可通过确定属于指令参数的数据明确。
•位置数据(机械臂和附加轴的终点位置)
•速度数据(理想速度)
•区域数据(位置精度)
•工具数据(如工具中心接触点的位置)
•对象数据(如当前坐标系)
运用适用于所有运动的逻辑指令确定机械臂的部分运动特征:
•最高速率和速率覆盖
•加速度
•不同机械臂配置的管理
•有效载荷
•接近奇点时的行为
•程序位移
•软伺服
•调整值
•事件缓冲区的启用和停用 可用相同指令对机械臂和附加轴进行定位。按恒定速度移动附加轴,与机械臂同时到 达终点位置
更多资讯:ABB机器人
